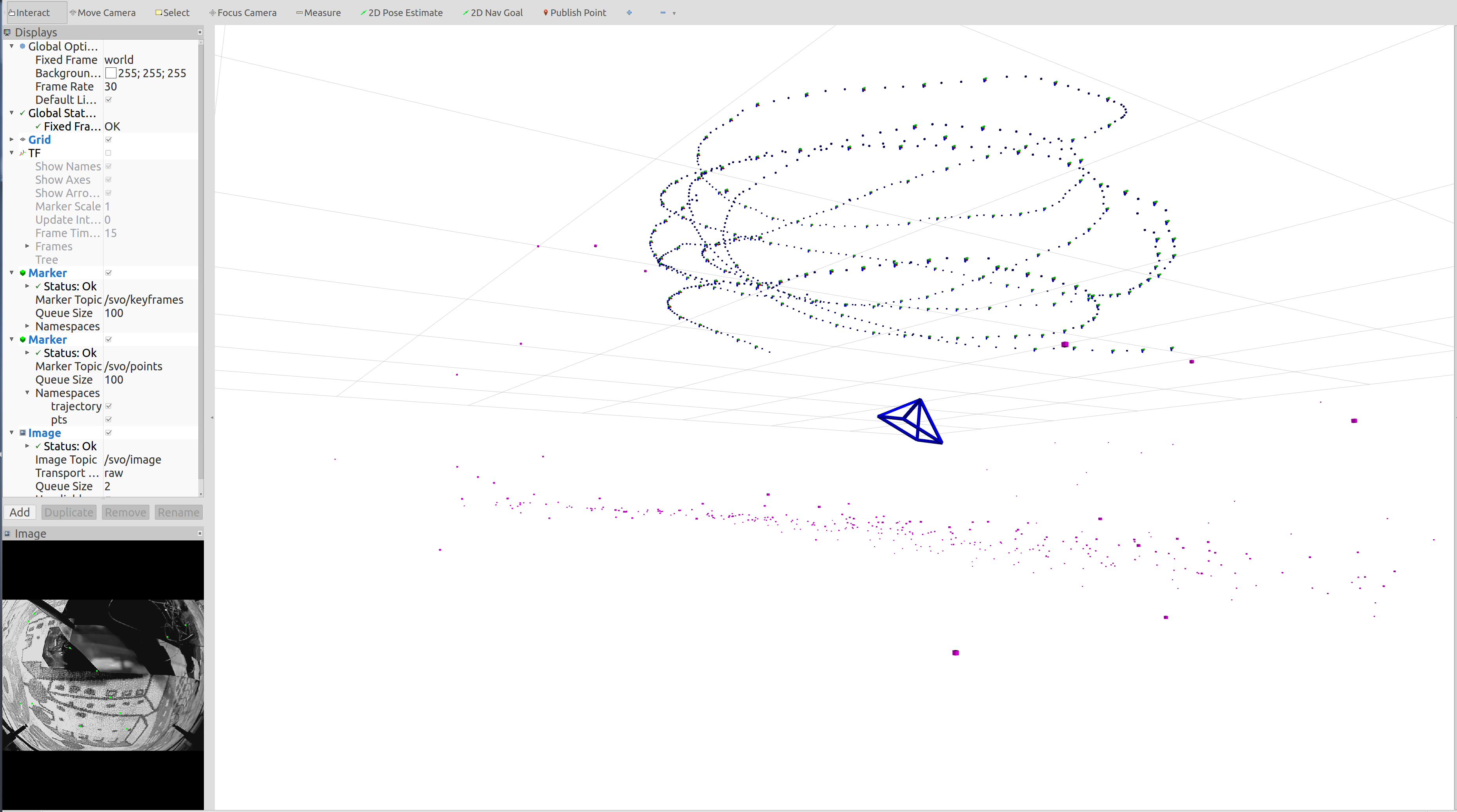
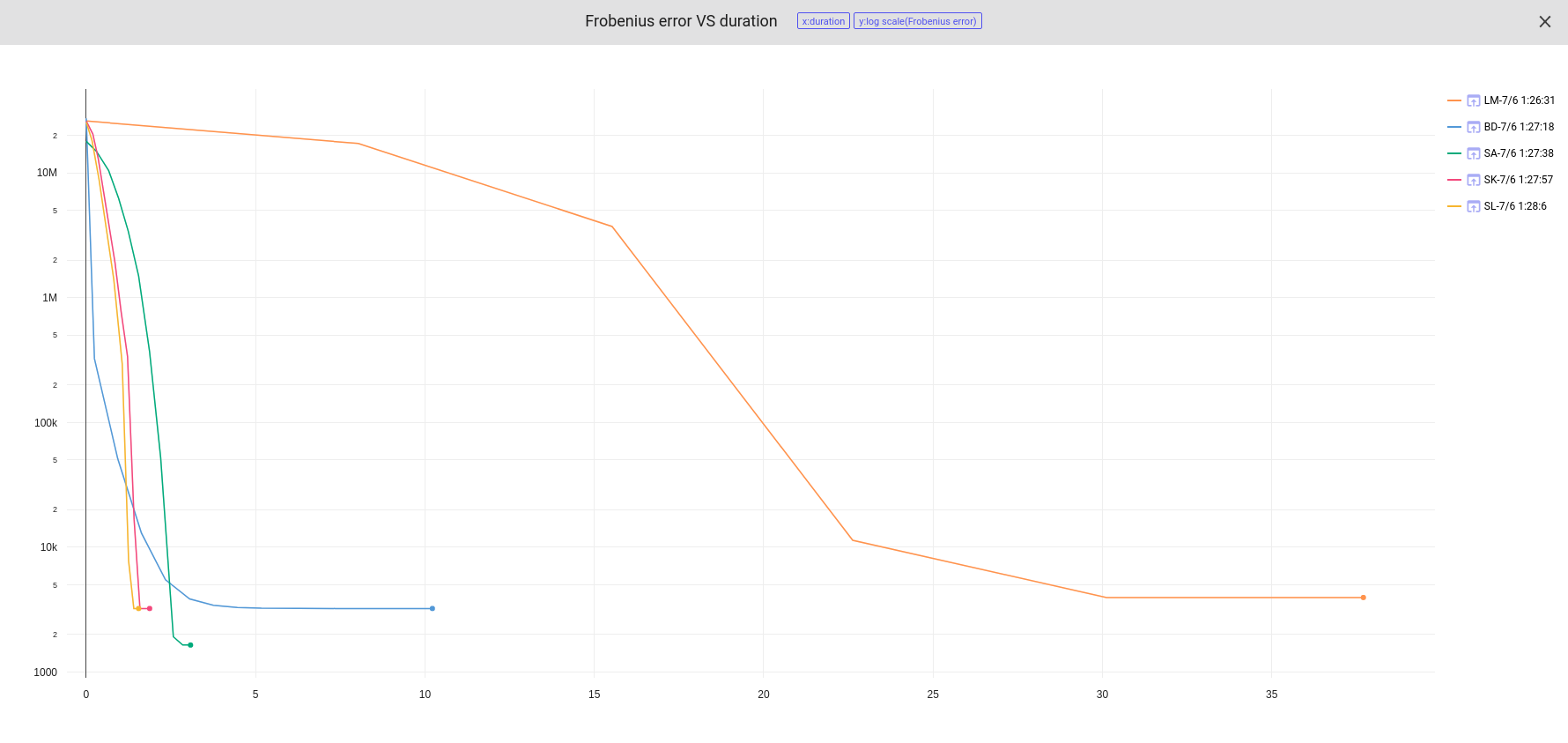
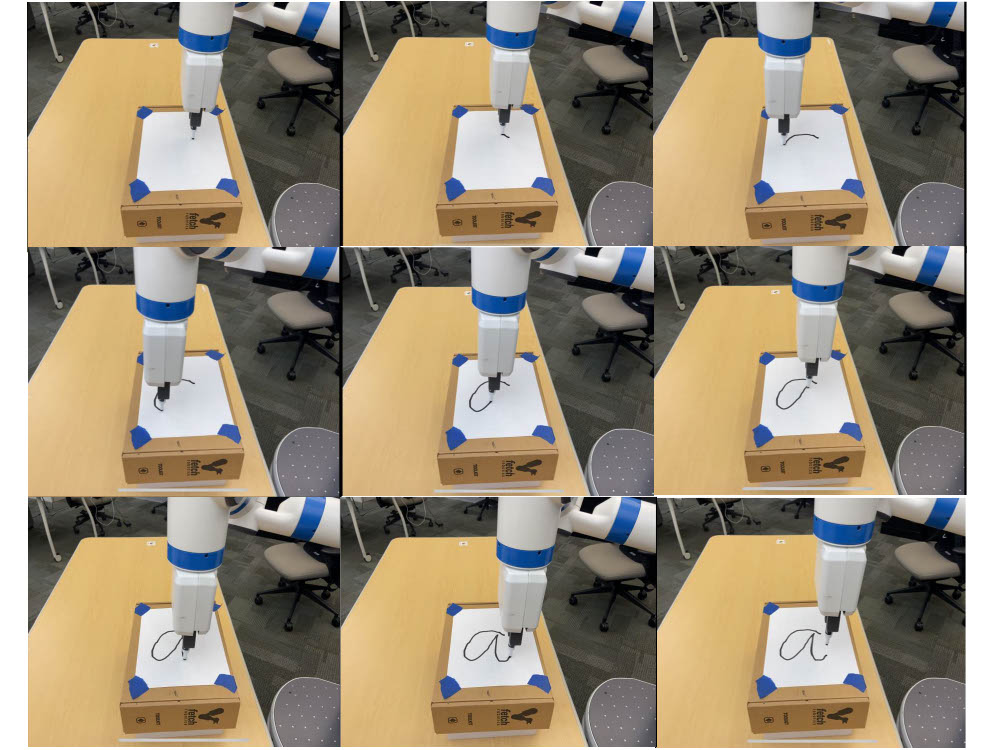
Visual SLAM on Unmanned Aerial Vehicle Extended Semi-direct Visual Odometry (SVO) by combining direct method and feature-based method in pose estimation and implemented Extended Kalman Filter (EKF) to improve the accuracy of pose estimation. Shonan Rotation Averaging A fast, simple, and elegant rotation averaging algorithm guaranteed to recover globally optimal solutions under mild assumptions on the measurement noise. robotic handwriting system Design a robot learning system to capture human's handwriting trajectories (demonstration) and learn from them(using DMP algorithm) in order to create its own handwriting trajectories.